
Commanding a Digital Servo Motor Using C and a Raspberry Pi
A small project of mine required the use of a servo motor commanded by a Raspberry Pi. Before this I had always used libraries to control servo motors, so I’d never bothered to investigate how they work. Well this time there was no library to use since I wanted to keep the code base in C and not Python like most things involving the Pi.
After some googling I decided to just use my scope and see what the output of an Arduino Uno was doing when using a servo control library. The scope revealed the servo is controlled using a 50Hz PWM signal where the duty cycle determines the target angle of the motor. My next question was, what exactly is driving the motor? With some logging I was able to create a function to determine the duty cycle given the target angle (0-180 degrees). An added benefit of doing it this way was being able to add in offsets to calibrate the target angle to the actual angle of my specific servo.
Scope Measurements and Code to Test Operation with a Raspberry Pi

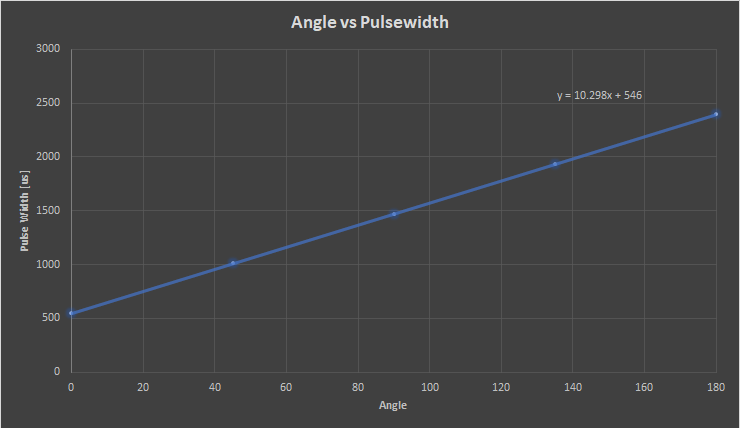
| Angle | Pulse Width [us] | Duty Cycle % |
|---|---|---|
| 0 | 546 | 2.73 |
| 45 | 1010 | 5.05 |
| 90 | 1472 | 7.36 |
| 135 | 1936 | 9.68 |
| 180 | 2400 | 12 |
//Terminal Servo Control for Raspberry Pi2
//ServoTest.c
//by Artin Isagholian
//2/2/2017
#include<stdio.h>
#include<bcm2835.h>
#include <string.h>
#include <stdlib.h>
#include <ctype.h>
void move(int angle, int prevangle, int hold, int align)
{
int pulse;
int j;
float hightime = 10.3*(float)angle + 546;
char c;
if(hold == 1)
{
printf("Holding indefinitely\n");
while(1)
{
bcm2835_gpio_set(18);//pin18 high
bcm2835_delayMicroseconds(hightime);
bcm2835_gpio_clr(18);//pin18 low
bcm2835_delayMicroseconds(20000 - hightime);//each pulse is 20ms
}
}
if(hold == 0)
{
if(align == 1)
{
//it takes roughly 33 for 180 degrees of rotation, using 40 for good measure
pulse = 40;
}
else
{
//calculate number of required pulses + 10 for good measure
pulse = (int)abs(((angle - prevangle)*33)/180) + 10;
}
//printf("Hightime: %f\n", hightime);
//printf("Pulse: %d\n", pulse);
for(j=0; j<pulse; j++)//exucting pulses
{
//printf("%d", j);
bcm2835_gpio_set(18);//pin18 high
bcm2835_delayMicroseconds((int)hightime);
bcm2835_gpio_clr(18);//pin18 low
bcm2835_delayMicroseconds(20000 - (int)hightime);//each pulse is 20ms
}
}
}
int input_check(char* input)
{ int error = 0;
int i;
int length = strlen(input);
if (length==4)
{
input[5] = '\n';
}
if(length>4 || input[length-1]!='\n' || (length!=2 && input[0]=='0') || input[0]=='\n')
{
error=1;
}
if(length==2 && input[0]=='q' && input[1]=='\n' && error==0)
{
error = 2;
}
if(error==0)
{
for (i=0;i<(length-1); i++)
{
if (!isdigit(input[i]) || isspace(input[i]))
{
error=1;
continue;
}
}
int angle = (int)strtol(input,NULL,10);
if ( (angle>180) || (angle<0) || (error==1)) //invalid input
{
error = 1;
}
}
return error;
}
int main(int argc, char **argv)
{
if(!bcm2835_init()) return 1;
int angle, prevangle, pulse, i;
char input[5];
bcm2835_gpio_fsel(18, BCM2835_GPIO_FSEL_OUTP); //set pin 18 as output
move(0, 0, 0, 1); //align to 0 degree point
prevangle = 0;
while(1)
{
printf("Enter an integer degree of rotation (0 to 180) or q to quit:\n");
fgets(input,5,stdin);
if (input_check(input)==2)
{
return 0;
}
if(input_check(input) == 1)
{
printf("Invalid input, try again.\n");
}
if (input_check(input) == 0)
{
angle = (int)strtol(input,NULL,10);
move(angle, prevangle, 0, 0);
prevangle = angle; //keeping track of previous angle to later calculate number of pulses
}
}
return 0;
}